
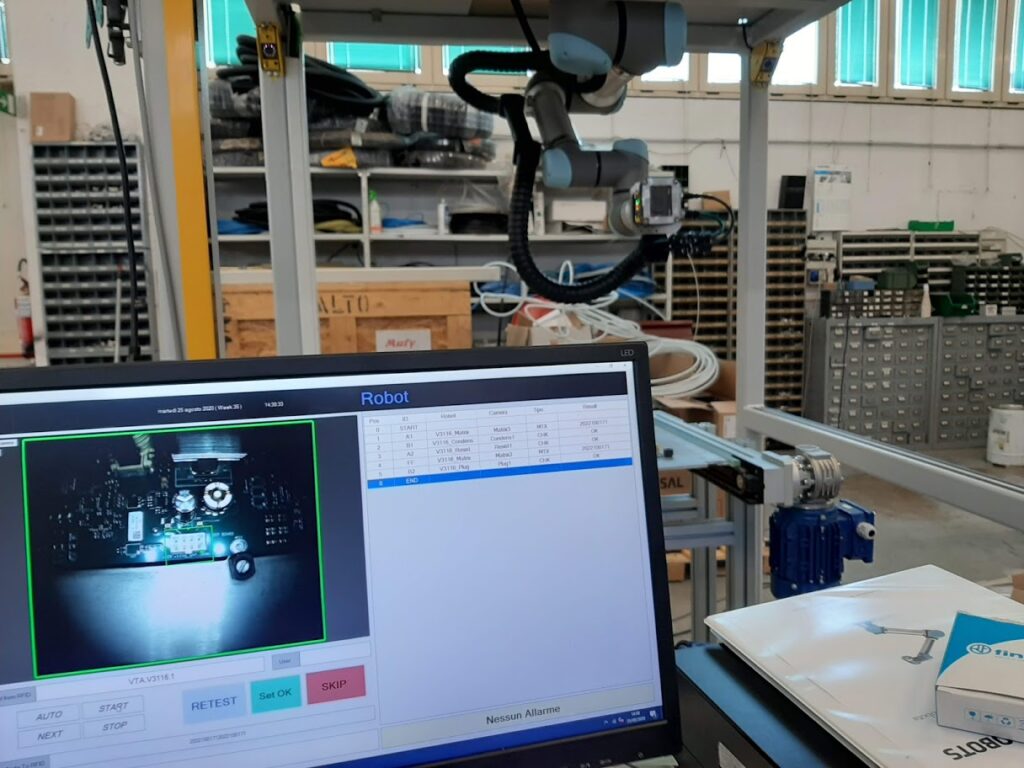
Su questi bracci meccanici possono essere installate pinze o sistemi di visione per il centraggio o l’ispezione. In questa applicazione è stata montata una telecamera COGNEX, con l’immagine di ispezione visibile sull’interfaccia uomo macchina.
E’ possibile infatti, tramite SDK, integrare l’immagine risultante dall’ispezione sull’applicativo realizzato in .NET, per avere sempre a disposizione da parte dell’operatore il risultato del controllo.
Esistono più server messi a disposizione dalla centralina Universal Robots, che mostrano lo stato del robot in tempo reale e possono essere analizzate velocemente dal PC. Il protocollo di comunicazione che ho scelto per efficacia e velocità è stato quella dell’Ethernet IP, con il PLC.
https://www.universal-robots.com/articles/ur/ethernet-ip-guide/
Per poter inserire il robot collaborativo nella rete è necessario il file .eds e la mappa del messaggio Ethernet-IP che viene scambiato.
https://s3-eu-west-1.amazonaws.com/ur-support-site/18712/UniversalRobot.eds
maseczki na twarz
SEO Backlinks
mawartoto
programlar
Adultfrinendfinder.de login
situs judi slot online
mawartoto